Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Kitae Kim
Dayuan Xu
Jaebum Park
http://dx.doi.org/10.5103/KJSB.2017.27.2.117 Epub 2017 July 15
Abstract
Objective: The purpose of this study was to examine the effect of changes in degrees of freedom of the fingers (i.e., the number of the fingers involved in tasks) on the task performance during force production and releasing task.
Method: Eight right-handed young men (age: 29.63±3.02 yr, height: 1.73±0.04 m, weight: 70.25±9.05 kg) participated in this study. The subjects were required to press the transducers with three combinations of fingers, including the index-middle (IM), index-middle-ring (IMR), and index-middle-ring-little (IMRL). During the trials, they were instructed to maintain a steady-state level of both normal and tangential forces within the first 5 sec. After the first 5 sec, the subjects were instructed to release the fingers on the transducers as quickly as possible at a self-selected manner within the next 5 sec, resulting in zero force at the end. Customized MATLAB codes (MathWorks Inc., Natick, MA, USA) were written for data analysis. The following variables were quantified: 1) finger force sharing pattern, 2) root mean square error (RMSE) of force to the target force in three axes at the aiming phase, 3) the time duration of the release phase (release time), and 4) the accuracy and precision indexes of the virtual firing position.
Results: The RMSE was decreased with the number of fingers increased in both normal and tangential forces at the steady-state phase. The precision index was smaller (more precise) in the IMR condition than in the IM condition, while no significant difference in the accuracy index was observed between the conditions. In addition, no significant difference in release time was found between the conditions.
Conclusion: The study provides evidence that the increased number of fingers resulted in better error compensation at the aiming phase and performed a more constant shooting (i.e., smaller precision index). However, the increased number of fingers did not affect the release time, which may influence the consistency of terminal performance. Thus, the number of fingers led to positive results for the current task.
Keywords
Finger Degrees of freedom Redundancy Archery
The human body is a system capable of achieving the same task via various ways, which is a result of the component variables having relatively more degrees of freedom (DOF) than the performance variables. Hence, the efficiency of the strategies of the central nervous system (CNS) to control redundant components is a major area of research in human movement science. Such abundance of DOF spans multiple levels, from joints and muscles to motor units, and recent studies suggest that the abundant DOF interact to stabilize the major performance variables (Park, Jo, Lewis, Huang, & Latash, 2013). In other words, various forms of movement enabled by redundant components are a result of interaction among each component to satisfy a task, and the method of this interaction may be understood with the principles of body control by the CNS (Latash, Danion, Scholz, Zatsiorsky, & Schoner, 2003).
Each finger may be considered an individual component that can produce force, and kinetic redundancy occurs when two or more fingers are used to produce force. When we view the redundancy problem from engineering and mathematical perspectives, this problem ultimately incurs computational burden on the control system; hence, multiple studies are underway to identify the solutions to the redundancy problem (Arimoto, Tahara, Bae, & Yoshida, 2003; Cheng & Orin, 1991; Xia, Feng, & Wang, 2005). In terms of human movement, the redundancy problem partially compensates the errors in which each component (finger) affects the performance outcome (resultant force). That is, redundancy does not incur a burden on the control system of the CNS but instead poses an advantage for the system to flexibly rectify the errors caused by each component (Gelfand & Tsetlin, 1966; Li, Latash, & Zatsiorsky, 1998; Latash, Scholz, Danion, & Schoner, 2001; Scholz, Danion, Latash, & Schoner, 2002).
Archery is a sport that involves the use of multiple fingers. In terms of the finger movement during release, it may be an example of kinetic redundancy experienced in the sports setting. The sport demands archers to consistently maintain the force on the bowstring and aim for the target by stably controlling the force produced by multiple fingers. In the actual game, clickers are used to control the distance by which the string is drawn, and archers are also demanded to be equipped with the ability to quickly respond to the clicker and release the finger (Leroyer, Van Hoecke, & Helal, 1993). Therefore, the shooting movement in archery is a complex task comprising two goals, namely stabilization of static force and quick release of the force. Previous studies report varying outcomes in relation to the type of task targeted by the control mechanism of the abundant components (fingers). The control mechanism of multiple components may differ depending on the performance variable that the system is aiming to stabilize or depending on the time required to perform the task (Latash, 2008; Latash, Shim, & Zatsiorsky, 2004). In this context, archery shooting is a task to be achieved by two different mechanisms to control the redundant fingers.
This study aimed at investigating the effects of change in DOF on the performance outcome. As previously mentioned, fingers, as redundant components, do have positive aspects, as they may compensate errors caused by one another and stabilize the outcome, but they also pose a challenge in quickly responding to the changes of force. Thus, this study seeks to understand the control mechanisms of multiple components and identify the effects of DOF on task performance in archery shooting-like action. We will test the following hypotheses in this study. First, increasing the DOF of fingers will reduce the error of force produced by the fingers. Second, it will increase the time required to release the force. Third, increasing the DOF of the fingers by reducing the error of force and increasing the release time will not have an impact on the outcome of performance (accuracy and precision).
1. Participants
Eight right-handed male adults (age: 29.63±3.02 years, height: 1.73±0.04 m, weight: 70.25±9.05 kg) participated in this study. None of the participants had a disease that may affect the functions of the arms, hands, and fingers. All the participants had adequate practice to familiarize themselves with the task before beginning the main experiment. This study was approved by the institutional review board (IRB No. 1703/002-006).
2. Apparatus
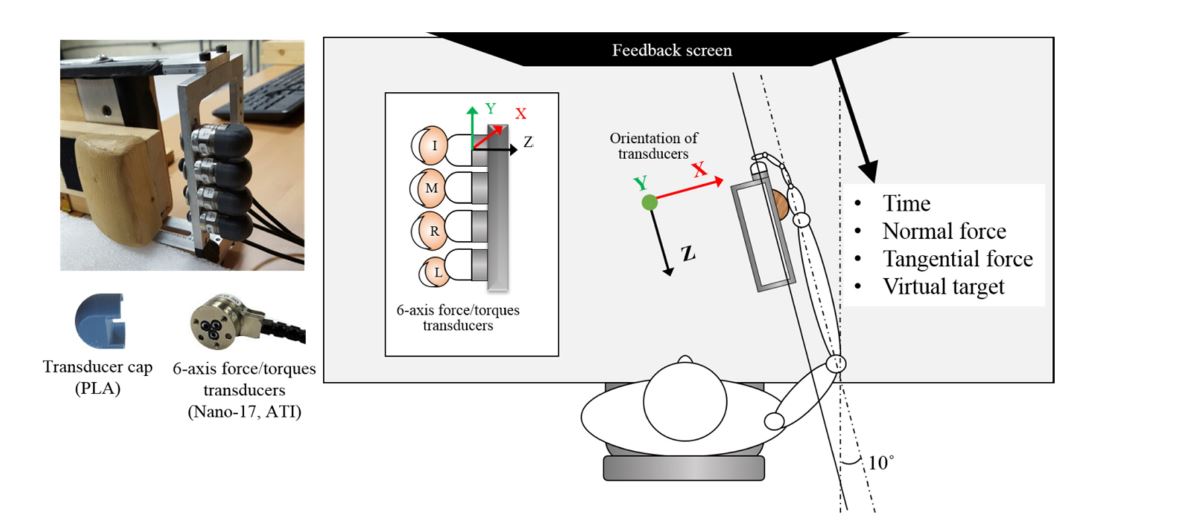
The task to be studied is a multi-finger force production and release task. To deliver steady levels of force throughout the experiment, the participants underwent a maximum voluntary contraction task prior to the study. Maximum voluntary contraction was measured by using four horizontally fixed piezoelectric transducers (208C02, PCB Piezotronics, Depew, NY). For the main task of the study (multi-finger force production and release task), four 6-axis force/torques transducers fixed onto a metal frame (Nano-17, ATI Industrial Automation, Garner, NC) were used (Figure 1). The transducers were oriented such that the direction of the press is perpendicular to the direction of gravity to eliminate the impact of gravity on the fingers when producing force. A transducer cap (poly lactic acid) was attached to each transducer to facilitate the natural force production and release (Figure 1).
While performing the task, the participant sat upright on the chair, and the right shoulder joint was positioned to be at approximately 45° flexion, 45° abduction, and 10° internal rotation (Figure 1). The X-, Y-, and Z-axes of the transducer represents the mediolateral, superoinferior, and anteroposterior directions with reference to the participant. Analog signals from the transducers were digitalized and transmitted to the computer by using an analog-digital converter (NI USB-6225, National Instruments, Austin, TX). During the experiment, a program that we developed using a programming software (LabVIEW 2015, National Instruments, Austin, TX) was used to collect data and provide visual feed- back to the participants.
3. Measurement
For the maximum voluntary contraction task, the participants placed four fingers on the four transducers that are horizontally fixed onto a metal plate and performed maximum isometric contraction for 5 seconds without counter movement. While the participants performed the trial task, the force values for each finger (MVCi, i = {index, middle, ring, little}) were obtained at the peak resultant force (MVCTOT). Two trials were performed, and the average of the values were used.
The main task (multi-finger force production and release task) emulates the aiming and release movements of archery. For this task, each participant presses on the transducers aligned along the Y-axis with three combinations of degrees of freedom (index-middle [IM], index-middle-ring [IMR], index-middle-ring-little [IMRL]) as if pulling (aiming) and quickly releasing their fingers from the transducers (release). This task is divided into the aiming and release phases. The aiming phase comprises the first 5 seconds, where the anteroposterior (Z-axis), mediolateral (X-axis), and superoinferior (Y-axis) force of pre-established magnitude is produced and steadily maintained, while the release phase comprises the subsequent 5 seconds, where the fingers are released as quickly as possible. The magnitude of the force that the participants must maintain within the first 5 seconds is set based on the magnitude of the energy stored in the bow. The anteroposterior force (Z-axis) was set to 50% of the MVCTOT (maximal force produced by four fingers), and the mediolateral and superoinferior forces were set to 0 N. In other words, the conditions of the force values for the aiming phase were set equally for all three finger combinations, and the virtual target was considered hit when no errors were found in the force values and the force release takes the form of a step function (drop to 0 N without time delay). The projectile projected through the release motion is a virtual object; it is a point mass that only has mass and no volume, and gravity is the only external force acting on the projectile. The onset of the release motion is self-paced by the participant and not induced by an external cue. Each participant is instructed to perform 25 trials of the task per condition (finger combination) with a minimum rest of 5 minutes between each condition and 10 seconds between each trial. The front monitor provides time information to alert participants of the phase during which a constant force must be maintained and the phase during which the force may be released, information about the force values for each component that should be maintained during the aiming phase, and information about the location that the released projectile hit on the virtual target.
4. Data processing
Data were analyzed by using customized MATLAB codes (MathWorks Inc., Natick, MA, USA). All the measured force values were filtered with a zero-lag fourth-order low-pass Butterworth filter (cutoff at 10 Hz). The coordinates of the projectile on the virtual target were set to be deter- mined by the initial velocity (speed and direction) of the projectile, and the initial velocity was assumed to be influenced by the loss of energy at the release of force. That is, energy is stored on the virtual bow during the aiming phase, and all stored energy is used for moving the virtual projectile to the target without loss if the release is made without time delay. The initial velocity of the projectile was calculated based on the magnitude of the force measured at the onset of release, modulus of elasticity (0.7 N/m) of the virtual bowstring, and weight of the virtual projectile (1 kg). Energy loss at force release was calculated under the assumption that the amount of impact on the initial velocity equals the integral of force during the release phase (Equation 1). In this experiment, we assumed that the elastic energy stored in the bow is converted to the kinetic energy of the projectile without loss, so the initial velocity of the projectile was calculated as per the equation below. Anteroposterior, mediolateral, and superoinferior velocity components were each calculated, and the acceleration of gravity for the superoinferior velocity was set to -9.81 m/.
j = {X, Y, Z}, : initial velocity of the virtual projectile, k : modulus of elasticity of the bow, m : mass of the virtual projectile, a : onset of release, b : end of release, that is, point at which
= 0 N,
: force in the j –axis at onset of release.
1) Definitions of the phases for analysis
In the multi-finger force production and release task, the onset of release was defined as the point equal to the 5% of the maximum value of the first derivative (maximal change) of the anteroposterior component (Z-axis) of the resultant force produced by the fingers participating in the task (Olafsdottir, Yoshida, Zatsiorsky, & Latash, 2005). Data from two phases were analyzed. The first phase, which is the aiming phase (where the force is maintained), was defined as the period between -1500 ms and -500 ms with reference to the onset of release (Equation 1a). The second phase, which is the release phase, began from the onset of release to the point at which the resultant forces of the fingers reached 0 N (Equation 1b).
2) Variables for analysis
The variables for analysis in this study were as follows: 1) finger force sharing pattern in the aiming phase, 2) root mean square error (RMSE) of force to the target force in three axes at the aiming phase, 3) the duration of the release time (RT), and 4) the accuracy index (AI; Equation 3), and precision index (PI; Equation 4) of the virtual firing position. The finger force sharing pattern in the aiming phase was presented as the mean force values in the aiming phase. RMSE, which represents the deviation from the target force in the aiming phase, was calculated as per Equation 2 and was standardized based on each target force.
j = {X, Y, Z}, i= 10 ms, : measured force
: target force
Releasing time (RT) is defined as the duration of the release phase. The AI is the mean displacement of the virtual projectile from the center of the virtual target, and the PI is the mean displacement of the virtual projectile in the given trial from the mean coordinates of the virtual projectile in previous trials (Kim, Kim, Koh, Yoon, Damiano, & Shim, 2016; Koh, Kwon, Park, Kiemel, Miller, Kim, Shin, & Shim, 2016). Each variable is calculated as per Equations 3 and 4.
i = each trial, = x coordinates of the location of the virtual projectile on the target,
= x coordinates of the center of the virtual target (0 mm),
= y coordinates of the location of the virtual projectile on the target,
= y coordinates of the center of the virtual target (0 mm),
= mean × coordinates of the location of the projectile on the virtual target in all trials,
= mean y coordinates of the location of the projectile on the virtual target in all trials.
5. Statistical analyses
Statistical analyses were performed by using the SPSS 21.0 (IBM, Armonk, NY) software, and repeated-measures analysis of variance (ANOVA) was performed to verify the statistical differences among the variables. The finger-related factors (4 levels: index, middle, ring, and little) and finger combination (3 levels: IM, IMR, and IMRL) were selec- tively included in the analysis depending on the variable to be analyzed. Statistical significance (α) was set at 0.05. Furthermore, a paired t test was used to verify the differences between the paired samples, and statistical significance (α) was set at 0.05.
1. Finger force sharing pattern
The maximum force in each finger was measured to set the target force for the main task. The maximum force was measured when all four fingers pressed the transducers simultaneously. The force produced by the index finger was greater than that produced by the remaining fingers, and no significant differences were found among the remaining three fingers. The force produced by the little finger tended to show large deviations across the participants in comparison with the size of the force per se. The results were confirmed by using one-way repeated-measures ANOVA and paired t test (Table 1).
|
Index |
Middle |
Ring |
Little |
F[DOF] |
p |
t |
|
|
Mean |
29.75 |
16.46 |
11.09 |
14.93 |
16.884 [3, 21] |
.000 |
I>MRL |
|
SD |
9.78 |
2.86 |
2.76 |
6.04 |
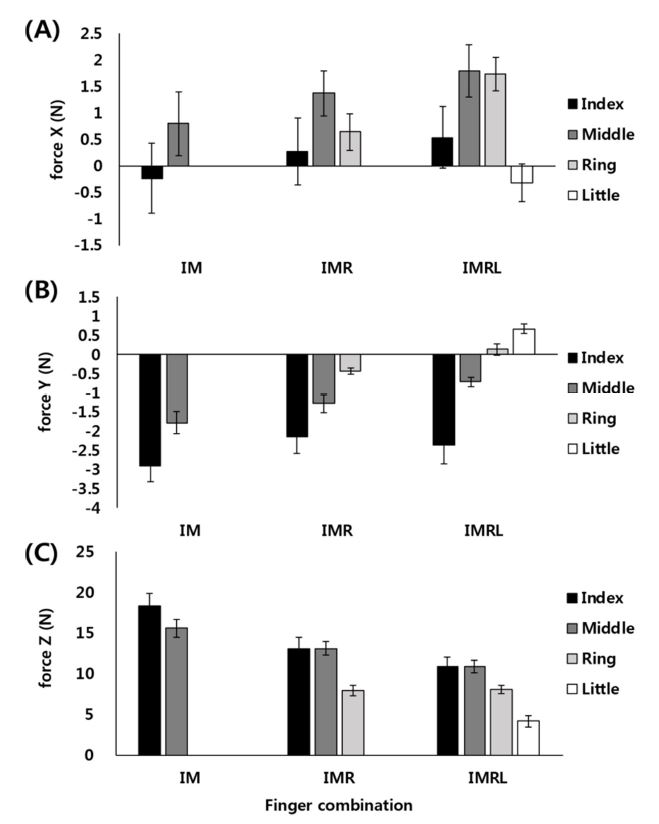
In terms of the right and left (mediolateral) components (X-axis) of the force, participation of more fingers (increased kinematic DOF) tended to increase the right component (direction of the back of the pulling hand) of the resultant forces of the fingers (Figure 2A). Furthermore, the right component of the middle (M) and ring (R) finger forces tended to be greater than that of the index (I) finger force. These results were analyzed with two-way repeated-measures ANOVA, including the finger-related factors (4 levels: I, M, R, and L) and finger combinations (3 levels: IM, IMR, and IMRL), which revealed that the main effects of the finger combination and fingers were both statistically significant (finger combination: F[2, 14]=10.70, p<0.005, each finger: F[3, 21]=5.32, p<0.01). The interaction effect of the finger and finger combination was also significant (F[6, 42]=4.03, p<0.005). This is presumed to be due to the trend that the forces produced by the index, middle, and ring fingers increased toward the right with an increasing number of fingers participating in the task while the force value for the little finger is 0 N in the IM and IMR conditions, but increases toward the left (palm of the pulling hand) in the IMRL condition. Furthermore, the paired t test showed that M was >I and R (p<0.05) in the IMR condition and M and R were >I and L (p<0.05) in the IMRL condition.
In terms of the superior and inferior components (Y-axis) of the force, the force produced by the index and middle fingers accounted for most of the force (Figure 2B). The upper (superior) component of the force increased with more fingers participating in the task; consequently, the resultant force shifted from a bottom-pulling form toward 0 N (target force). These results were verified with two-way repeated-measures ANOVA, including the finger-related factors and finger combinations, which revealed that the main effects of the finger and finger combinations were both statistically significant (finger combination: F[2, 14]= 15.14, p<0.001, each finger: F[3, 21]=30.33, p<0.001). The interaction effect of the finger and finger combination was also significant (F[6, 42]= 4.57, p<0.005), which is presumed to be a result of the trend that the force produced by the ring finger was 0 N in the IM condition, but the bottom (inferior) component of the force began to increase in the IMR condition. Furthermore, the paired t test showed that IM was >IMR and IMRL for the index finger (p<0.05), IM and IMR were >IMRL for the middle finger (p<0.05), and IMR was >IMRL for the ring finger (p<0.05).
In terms of the anteroposterior component of the force (Z-axis), participation of more fingers in the task tended to reduce the force produced by the index and middle fingers (Figure 2C). However, the difference between the index and middle finger forces tended to remain consistent irrespective of the number of fingers participating in the task. The ring and little fingers produced relatively smaller forces than the index and middle fingers, and the ring finger produced a greater force than the little finger. These results were verified with two-way repeated-measures ANOVA, including the finger-related factors and finger combinations, which revealed that the main effect of the finger combination was not significant but that of the finger was significant (F[3, 21]=77.45, p<0.001). The interaction effect of the finger and finger combination was significant (F[6, 42]=60.75, p<0.001), which is presumed to result from the finding that the little and ring finger forces were equal to 0 N in the IM condition and the ring finger force was equal to 0 N in the IMR condition. Furthermore, the paired t test showed that I, M>R sequence in the IMR condition (p<0.05), and I, M, R>L sequence in the IMRL condition (p<0.05).
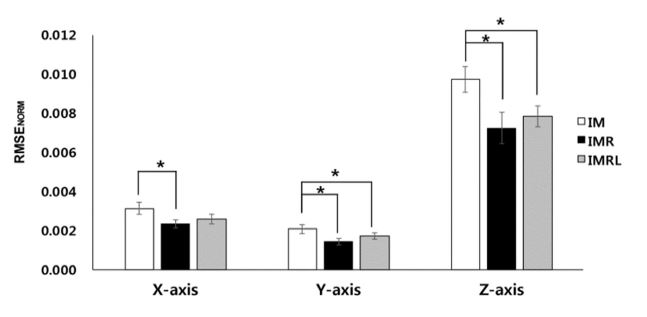
2. Root mean square error
The RMSE for each axis component (mediolateral: X-axis, superoinferior: Y-axis, and anteroposterior: Z-axis) is presented according to finger combination condition (Figure 3). The RMSE values for all the components differed in relation to the number of fingers participating in the task, and RMSE was relatively greater in the IM condition than in the other conditions. This was verified with one-way repeated-measure ANOVA (X: F[2, 14]=4.789, p<0.05; Y: F[2, 14]=5.293, p<0.05; Z: F[2, 14]= 12.520, p<0.005). The RMSE for each condition was compared with the paired t test, which showed that IM>IMR sequence for the X-axis component (p<0.05), IM>IMR, IMRL sequence for the Y-axis com- ponent (p<0.05), and IM>IMR, IMRL sequence for the Z-axis component (p<0.05).
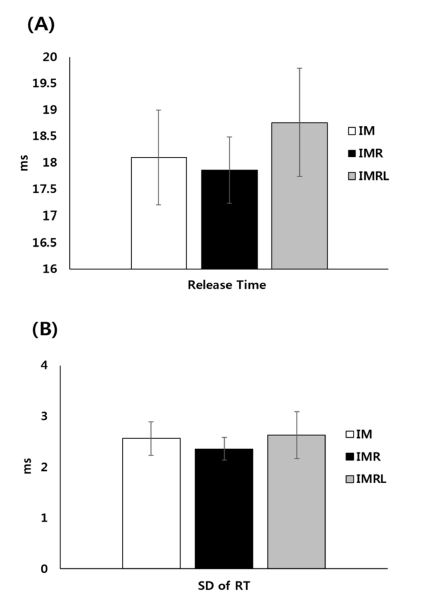
3. Releasing time
The RT and standard deviations of RT in relation to the DOF of the fingers are presented in (Figure 4). One-way repeated-measures ANOVA and paired t test revealed that no significant differences in RT in relation to finger combination (Figure 4A) and among the standard deviations for the conditions (Figure 4B).
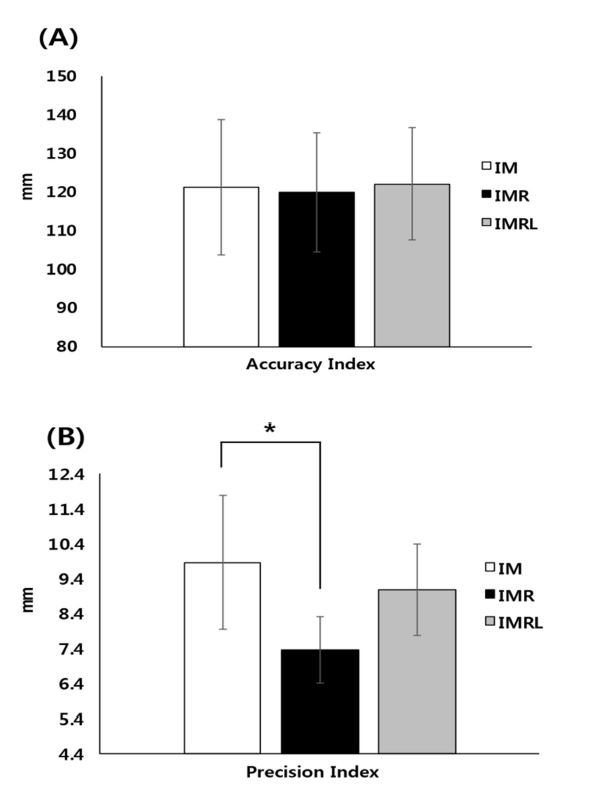
4. AI and PI
The AI and PI for the virtual projectile are presented for each finger combination (Figure 5). No significant change was found in AI, which represents the accuracy of the firing with reference to the center of the target. On the other hand, the PI, which represents the consistency across trials, significantly differed between the IM and IMR conditions, which was also verified by the paired t test results (IM>IMR, p<0.05).
This study was aimed at investigating the effects of the DOF of the fingers on the performance of multi-goal tasks as follows: stabilization of force (static goal) and quick release of force (dynamic goal). The task used in this study emulates the dynamics of aiming and releasing motions of the aiming and release motions in archery; hence, the findings of this study would provide valuable insights into understanding the kinetics and control of multi-digits in archery. Previous studies have reported that the most important determinant of archery performance is the finger movement in the release phase (Hah & Yi, 2008; Stuart & Atha, 1990). The DOF of the fingers may influence force control, which varies throughout the short release phase, viewing the relationship between the problem regarding the DOF of the fingers and the game performance from biomechanical and motor control perspectives would enable a broad understanding of successful shooting motion in archery. Previous studies have explained that using multiple fingers partially compensates the errors arising from each finger in some tasks (Latash et al., 1998, 2001; Scholz et al., 2002). Our findings show that the error of the resultant force of the fingers is reduced by increasing the number of fingers participating in the task. This suggests that increasing the kinetic DOF of the fingers reduces the error of the resultant force through an interaction among the forces produced by each finger, ultimately contributing to stabilizing the resultant force produced by the fingers.
Increasing the DOF more stably controlled the force in the aiming phase but did not improve the accuracy of the shooting (accuracy of the virtual projectile with reference to the center of the target) in the release phase. On the other hand, precision, which represents consistency across trials, was higher when three fingers were used than when two fingers were used. In addition to accurately shooting at the target, achieving consistent performance is a critical factor in superior archery performance (Kim, 2005; Kim, 2008; Leroyer et al., 1993; Martin, Siler, & Hoffman, 1990; Nishizono, Shibayama, Izuta, & Saito, 1987). Finger movement during a release motion in archery is achieved via diverse strategies, including active contraction of the finger extensor and passive release by the bowstring by releasing the force of the finger flexors (Martin et al., 1990; McKinney & McKinney, 1997). A previous study reports that active extension of the finger during a release in archery hinders consistent shooting by displacing the lateral direction of the bowstring, suggesting that a passive form of release is more advantageous to achieving consistent scores (Martin et al., 1990). Furthermore, studies explain that extensive training is critical to attain this because a harmonious balance must be achieved between the relaxation of the finger flexors and contraction of the finger extensors (Ertan, Kentel, Tümer, & Korkusuz, 2003). According to our findings, increasing the DOF of the fingers is beneficial to consistent shooting in archery. To explain this phenomenon, we set equal target forces across DOF conditions. In other words, increasing the DOF of the fingers may have reduced the load on each finger, and the relative reduction of force produced by each finger may have had positive effects on controlling the force of each finger.
Meanwhile, the AI is directly related to RT. Increasing the RT increases the loss of energy stored in the bow throughout the release phase, which may be the culprit of missing the center of the virtual target. That is, the absolute length of the RT affects the AI and deviations of the RT affects the PI. The authors predicted that increasing the DOF of the fingers would increase RT, but RT did not significantly differ in relation to changes in the DOF of the fingers in the study. As previously explained, increasing the finger RT decreases the relative force produced and maintained by each finger, and it may be beneficial for releasing the force to 0 N. Such benefits might have offset the negative effects of increasing the DOF of the fingers. Meanwhile, no significant difference in RT deviation was observed across the conditions. This suggests that the improvement of precision as a result of increasing the DOF of the fingers is not mediated by a consistent RT and that the stable control of the force throughout the aiming phase until right before the release would have been conducive to consistent performance of the task. In other words, consistent control of force as a result of an increase in DOF to a certain extent seems to bring about positive effects on task performance.
This study was conducted to test three hypotheses: first, increasing the DOF of the fingers will decrease the error of the resultant force of the fingers while, second, increasing RT, which, third, will not affect the outcome of task performance (accuracy and precision). The findings of this study support the first hypothesis but rejects the second and third hypotheses. The findings suggest that increasing the DOF of the fingers contributes to stabilizing the resultant force of the fingers and increases the precision of task performance.
The contribution of this study to understanding finger movements in multi-goal tasks is highly beneficial, considering the nature of archery, where precise performance across trials is critical. In an actual game, clickers are used to control the distance to which the string is drawn, and quick response to clickers is an essential skill demanded of archers (Leroyer et al., 1993). Furthermore, increasing the DOF of the fingers participating in the task also has negative aspects, as it hampers flexible response to the changes of such dynamic forces. In other words, increasing the DOF encompasses both positive and negative aspects. In studies to follow, we plan to substantiate the possibilities found in this study by examining additional variables, based on which we will investigate the optimal solution to multi-goal tasks, where positive factors are highlighted while negative factors are minimized.
The decrease in the error of the resultant force suggests that the fingers employed in the task indeed compensate one another's errors, thereby stabilizing the performance variable, that is, the resultant force produced by the fingers. The findings of our study show that increasing the DOF of the fingers stabilized the resultant force of the fingers in the aiming phase through an interaction among the fingers and contributed to improving the precision of task performance.
References
1. Arimoto, S., Tahara, K., Bae, J. H. & Yoshida, M. (2003). A stability theory of a manifold: concurrent realization of grasp and orientation control of an object by a pair of robot fingers. Robotica, 21, 163-178.
Crossref
Google Scholar
2. Cheng, F. T. & Orin, D. E. (1991). Optimal Force Distribution in Multiple-Chain Robotic Systems. IEEE Transactions on Systems Man and Cybernetics, 21(1), 13-24.
Crossref
Google Scholar
3. Ertan, H., Kentel, B., Tümer, S. T. & Korkusuz, F. (2003). Activation patterns in forearm muscles during archery shooting. Human Movement Science, 22(1), 37-45.
Crossref
Google Scholar
4. Gelfand, I. M. & Tsetlin, M. (1966). On mathematical modeling of the mechanisms of the central nervous system. In I. M. Gelfand, V. S. Gurfinkel, S. V. Fomin & M. L. Tsetlin (Eds.), Models of the structural-functional organization of certain biological systems (pp. 9-26). Moscow (a translation is available in 1971 edition by MIT Press: Cambridge, MA): Nauka
Crossref
5. Hah, C. K. & Yi, J. H. (2008). Evaluation on Kinematic Factors Affecting Scores of Olympic Round Game during the Follow Through in Archery. Korean Journal of Sport Biomechanics, 18(1), 227-234.
Crossref
Google Scholar
6. Kim, J. P. (2005). The correlation of the physical stability and the performance of archers in non-shooting and shooting. Korean Journal of Sports Biomechanics, 10(1), 152-152.
Crossref
7. Kim, J. P. (2008). The effect of balance exercise on postural control and shooting record in archers. Korean Journal of Sport Biomechanics, 18(2), 65-74.
Crossref
Google Scholar
8. Kim, Y., Kim, W. S., Koh, K., Yoon, B., Damiano, D. L. & Shim, J. K. (2016). Deficits in motor abilities for multi-finger force control in hemi- paretic stroke survivors. Experimental Brain Research, 234(8), 2391 -2402.
Crossref
Google Scholar
9. Koh, K., Kwon, H. J., Park, Y. S., Kiemel, T., Miller, R. H., Kim, Y. H., Shin, J. H. & Shim, J. K. (2016). Intra-Auditory Integration Improves Motor Performance and Synergy in an Accurate Multi-Finger Pressing Task. Frontiers in Human Neuroscience, 10, 1-11.
Crossref
Google Scholar
10. Latash, M. L. (2008). Synergy, Oxford University Press.
Crossref
Google Scholar
11. Latash, M. L., Danion, F. J., Scholz, F., Zatsiorsky, V. M. & Schoner, G. (2003). Approaches to analysis of handwriting as a task of coordinating a redundant motor system. Human Movement Science, 22(2), 153-171.
Crossref
Google Scholar
12. Latash, M. L., Li, Z. M. & Zatsiorsky, V. M. (1998). A principle of error compensation studied within a task of force production by a redundant set of fingers. Experimental Brain Research, 122(2), 131-138.
Crossref
Google Scholar
13. Latash, M. L., Scholz, J. F. Danion, F. & Schoner, G. (2001). Structure of motor variability in marginally redundant multifinger force production tasks. Experimental Brain Research, 141(2), 153-165.
Crossref
14. Latash, M. L., Shim, J. K. & Zatsiorsky, V. M. (2004). Is there a timing synergy during multi-finger production of quick force pulses?. Experimental Brain Research, 159(1), 65-71.
Crossref
Google Scholar
15. Leroyer, P., Van Hoecke, J. & Helal, J. N. (1993). Biomechanical study of the final push-pull in archery. Journal of Sports Sciences, 11(1), 63 -69.
Crossref
Google Scholar
16. Li, Z. M., Latash, M. L. & Zatsiorsky, V. M. (1998). Force sharing among fingers as a model of the redundancy problem. Experimental Brain Research, 119(3), 276-286.
Crossref
Google Scholar
17. Martin, P. E., Siler, W. L. & Hoffman, D. (1990). Electromyographic analysis of bow string release in highly skilled archers. Journal of Sports Sciences, 8(3), 215-221.
Crossref
Google Scholar
18. McKinney, W. & McKinney, M. (1997). Archery. brown & benchmark. Madison, WI.
Crossref
19. Nishizono, A., Shibayama, H., Izuta, T. & Saito, K. (1987). Analysis of archery shooting techniques by means of electromyography. International Society of Biomechanics in Sports. Proceedings, Sym- posium V, Athens, Greece.
Crossref
Google Scholar
20. Olafsdottir, H., Yoshida, N., Zatsiorsky, V. M. & Latash, M. L. (2005). Anticipatory covariation of finger forces during self-paced and reaction time force production. Neuroscience Letters, 381(1), 92-96.
Crossref
Google Scholar
21. Park, J., Jo, H. J., Lewis, M. M., Huang, X. & Latash, M. L. (2013). Effects of Parkinson’s disease on optimization and structure of variance in multi-finger tasks. Experimental Brain Research, 231(1), 51-63
Crossref
Google Scholar
22. Scholz, J. P., Danion, F. Latash, M. L. & Schoner, G. (2002). Understanding finger coordination through analysis of the structure of force variability. Biological Cybernetics, 86(1), 29-39.
Crossref
Google Scholar
23. Stuart, J. & Atha, J. (1990). Postal consistency in skilled archers. Journal of Sports Sciences, 8, 223-234.
Crossref
Google Scholar
PubMed
24. Xia, Y. S., Feng, G. & Wang, J. (2005). A primal-dual neural network for online resolving constrained kinematic redundancy in robot motion control. IEEE Trans Syst Man Cybern B Cybern, 35(1), 54-64.
Crossref
Google Scholar
