Open Access, Peer-reviewed
eISSN 2093-9752
Open Access, Peer-reviewed
eISSN 2093-9752
Minjoo Lee
Sang-Kyoon Park
http://dx.doi.org/10.5103/KJAB.2025.35.3.229 Epub 2025 October 02
Abstract
Objective: The purpose of this study was to investigate the effect of shoes toe-spring angle on foot movement characteristics and joint loading for better understanding the biomechanical function of toe-spring during walking.
Method: Fifteen males (age: 24.3 ± 2.6 years, height: 176.7 ± 4.7 cm, weight: 75.2 ± 7.5 kg) participated in this study. After a warm-up, participants walked at three different speeds (1.1 m/s, 1.3 m/s, preferred speed) wearing three types of shoes with different toe-spring angles (4.7°, 12.8°, and 22.5°). Kinematic data were recorded using nine infrared cameras (sampling rate: 200 Hz) and kinetic data were measured using electromyography (EMG) and an instrumented treadmill (sampling rate: 2,000 Hz). Participants walked for 5 minutes in each condition, and the last 1 minute, comprising 10 consistent strides, was analyzed. Statistical analysis was performed using one-way ANOVA with repeated measures in SPSS 25 (IBM, USA), and post-hoc tests were conducted using Bonferroni correction. The significance level was set at α = .05.
Results: As the toe spring angle increased, increased step length with decreased contact time were observed, while walking cadence was increased. Furthermore, the maximum dorsiflexion angle and moment of the metatarsophalangeal (MTP) joint was decreased, while the maximum plantarflexion angle of the ankle joint at toe off was increased. However, peak plantarflexion moment of the ankle joint was decreased with an increased toe-spring angle. Additionally, as the toe-spring angle increased, the second peak of vertical ground reaction force decreased, whereas the second peak of anterior-posterior ground reaction force increased. Finally, the muscle activity of the tibialis anterior decreased with an increased toe-spring angle.
Conclusion: Our results indicate that as the toe spring angle increases, the load on the lower limb joints decreases. This suggests that the toe spring structure may have a positive effect on preventing lower limb injuries caused by lowering repetitive stress during walking. In particular, the toe spring facilitates smooth and efficient movement by increasing ankle motion during propulsion, aiding in ground push-off. Therefore, wearing shoes with an appropriate angle of toe spring structure during prolonged walking may promote smooth lower limb joint movement, contributing to stable and efficient gait. However, further study including the condition of higher toe spring angle at a faster walking speed would be warranted.
Keywords
Toe-spring MTP joint Foot rocker Walking
보행은 신체의 움직임을 통해 다른 장소로 이동하는 행위를 의미한다(Neumann, 2018). 이때 보행은 이동의 자유의 정도를 나타낼 수 있고 운동과 건강상태를 나타내는 지표로 활용될 수 있다(Cho & Kim, 2002; Jang, Lee, Yang & Lee, 2016). 이러한 관점에서 보행의 분석은 신체의 기능적 평가나 질병에서의 회복 및 건강의 상태를 확인하는데 있어 매우 중요한 연구분야로 활용되고 있다.
보행은 지면의 접촉을 중심으로 디딤기(stance phase)와 흔듦기(swing phase)로 구분할 수 있다. 그 중 디딤기는 발이 지면의 지지를 통해 지면으로부터 오는 충격을 흡수하고, 지면을 밀어 앞으로 추진하는 구간이다. 이 과정에서 신체는 중력과 이동에서 발생하는 가속에 의해 지면에 힘을 가하게 되고 이에 반대 방향으로 발생하는 지면반력(ground reaction force [GRF])을 이용하여 이동하게 된다. 특히 수직 지면반력(vertical GRF)은 충격과 추진 시 두 정점을 나타내며(Jeong, 2011), 전후 방향의 지면반력(anterior-posterior GRF)과 함께 보행 시 제동력과 추진력을 발생하게 된다. 추진 구간 중 밀기(push off)는 발꿈치 떼기(heel off)부터 발가락 떼기(toe off)까지의 구간이며, 이때 신체는 하지관절의 주요한 근육을 중심으로 활성화하여 지면을 밀어 이동한다(Perry, 2012).
원활한 보행을 위해서는 하지분절의 움직임과 힘의 발생을 위한 기능적 작용이 중요하다. 선행연구에 따르면 보행 시 발은 락커 구조를 형성하여 보행을 돕는다. 해부학적 관점에서 발의 락커는 총 3가지로 나뉘며, 발꿈치 락커(Heel rocker), 발목 락커(Ankle rocker), 전족 락커(Forefoot rocker)로 구성된다(Mayich, Novak, Vena, Daniels & Brodsky, 2014). 지면에 발이 접촉하는 시점에 따라 발꿈치 락커는 초기 접지 충격을 흡수하고, 발목 락커는 신체를 전방으로 이동시키며, 전족 락커는 추진력을 생성하는 역할을 수행한다(Perry, 2012). 전족 락커는 추진 구간이 시작되면 발허리발가락관절(metatarso- phalangeal joint [MTP])을 축으로 활성화되며 발목은 저측굴곡, MTP 관절은 배측굴곡하며 추진력을 생성한다. 또한 전족 락커는 발허리뼈와 엄지발가락을 이용해 지면을 밀며, 신체를 전방으로 이동시킨다(Jung, Park, Won, Kwon & Kim, 2012; Perry, 2012). 이 동작을 수행하기 위해서는 MTP 관절의 충분한 가동성과 강한 발목 저측굴곡근이 필수적으로 필요하다(Perry, 2012).
이러한 발의 해부학적 관점에서 전족 락커의 축인 MTP 관절은 보행을 진행할 때 발 아치 유지, 체중 지탱, 발에 가해지는 스트레스를 조절한다고 하였다(Zhang, Si, Zhang & Liu, 2014). 이를 뒷받침하는 신발의 역학적 역할 또한 중요하며, 그 중 신발 아웃솔의 둥그런 형태인 락커(rocker) 구조는 발이 지면에 닿아 있는 동안 발과 발목이 지면을 밀어내기에 안정적인 동작을 만들어 추진을 도움으로써 전족의 기능에 긍정적인 영향을 준다(Van Bogart et al., 2005). 락커 형태의 아웃솔은 보행의 지지기에 발목을 중심으로 지면반력으로부터 발생하는 모멘트를 감소시켜 발목의 부하를 감소시키는 효과가 있다(Long et al., 2007). 특히, 신발의 구조 중 토 스프링(Toe-spring)은 MTP 관절을 배측굴곡 시킨 형태로(Kim & Kim, 2000) 자연스러운 전족 락커를 생성하며 지면을 밀 때 효율적인 움직임을 만들어준다고 하였다(Sichting, Holowka, Hansen & Lieberman, 2020). 따라서 선행연구들에서는 보행능력을 향상하기 위한 다양한 기능성 신발이 개발되고 있으며(Byun, 2010), 그 중에서도 신발의 토 스프링 구조는 전족 락커 형성을 통해 MTP 관절을 포함한 하지관절의 움직임을 보조하는 도구로 사용되어진다고 하였다(Shim & Woo, 2018).
보행에 있어서 신발 전족 부위의 형태와 MTP 관절과의 관계를 통해서 보행 움직임의 특성과 효율성 등의 효과에 관해서 연구가 이루어지고 있다(Ruggiero, Carpi & Minetti, 2022; van Kouwenhove, Verkerke, Postema, Dekker & Hijmans, 2021). 하지만 MTP 관절의 움직임을 제한하였을 때 불안정한 움직임을 유발하게 되며 이때 발 기능 손상, 보행 패턴 변화 등을 나타낼 수 있다고 하였다(Zhang et al., 2014). 또한, 장기간 MTP 관절 움직임의 제한은 발과 발가락뿐만 아니라 하지 관절 전반에 과부하를 발생시켜 잠재적 문제가 발생할 수 있다(Nawoczenski, Baumhauer & Umberger, 1999). 토 스프링 각도 별 샌들을 제작하여 실험을 실시한 Sichting 등 (2020)은 토 스프링의 각도가 증가할수록 MTP 관절의 배측굴곡을 제어하기 위해 내재적 발 근육의 신장성 일이 감소할 수 있음을 시사하였다.
따라서, 보행의 기능을 돕기 위한 신발 전족 부위의 다양한 구조에 대한 연구는 활발하게 진행되고 있는 반면, 보행의 생체역학적 측면에서 토 스프링의 효과와 적정한 각도의 정도에 대한 연구가 상대적으로 미흡한 실정이다. 본 연구의 목적은 신발의 전족 부위의 구조가 추진 시 보행 시 보행 지수 및 발의 움직임과 관절에 발생하는 부하의 특성을 분석하여 토 스프링 구조의 운동역학적 기능을 이해하고자 하였다.
1. 연구대상자
본 연구에는 270 mm 신발을 착용하며 최근 6개월 이내 근골격계에 상해가 없는 20대 남성 15명(age: 24.3±2.6 yrs, height: 176.7±4.7 cm, weight: 75.2±7.5 kg)을 대상자로 모집하였다. 실험을 수행하기 전, 연구기관의 생명윤리위원회에 심의 승인을 받았으며(승인번호: 1263-202406-HR-075-01), 모든 피험자들은 실험에 참여하기 전 실험과정에 대한 설명을 듣고 자발적 참여 의사를 가진 피험자를 대상으로 연구 참여 동의서에 서명 후 실험을 진행하였다.
2. 실험 절차 및 방법
본 연구는 운동화 토 스프링 각도에 따른 보행 시 운동역학적 차이를 분석하기 위하여 적외선 카메라 9대(sampling rate: 200 Hz)와 지면반력기가 내장된 트레드밀 1대 및 근전도 측정기 2채널(sampling rate: 2,000 Hz)을 사용하여 동작분석을 수행하였다. 지면반력 트레드밀(instrumented tread- mill, Bertec, USA) 주변으로 9대의 적외선 카메라(Oqus 300, Qualisys, Sweden)를 설치하고(Figure 1), L-frame과 T-wand를 사용하여 NLT (non-linear transformation) 방식으로 3차원 좌표계를 설정하였다. 대상자의 관절과 분절을 정의하기 위해 <Figure 2>와 같이 53개의 반사마커(reflective marker)를 부착하였고, 이를 사용해 각 분절의 지역좌표계를 설정하였다. 또한 근활성도 차이 분석을 위해 무선 근전도 측정기(Ultium ESP, Noraxon, USA) 2채널을 사용하여 내측 장딴지근과 앞정강근의 근활성도를 측정하였다. 이때 대상자의 근육의 활성도를 표준화하기 위하여 최대 자발적 수의적 등척성 수축(maximum voluntary isometric contract [MVIC])을 측정하였다. Qualisys Track Manager 프로그램(Qualisys, Sweden)를 사용하여 운동역학적 데이터를 취득하였고, 취득한 데이터는 A/D Board를 통해 동조하였다. 공간좌표 정의를 위한 전역좌표계의 설정은 X축을 좌우, Y축을 전후, Z축을 상하 방향으로 설정하였다(Figure 1). 실험 동의서에 계획된 내용에 서명을 한 후 실험을 위해 연구대상자들은 상의는 탈의하였으며, 하의는 짧고 몸에 붙는 타이즈를 착용하였다. 동작을 수행하기 전 모든 대상자들은 충분한 준비운동을 실시하였다.
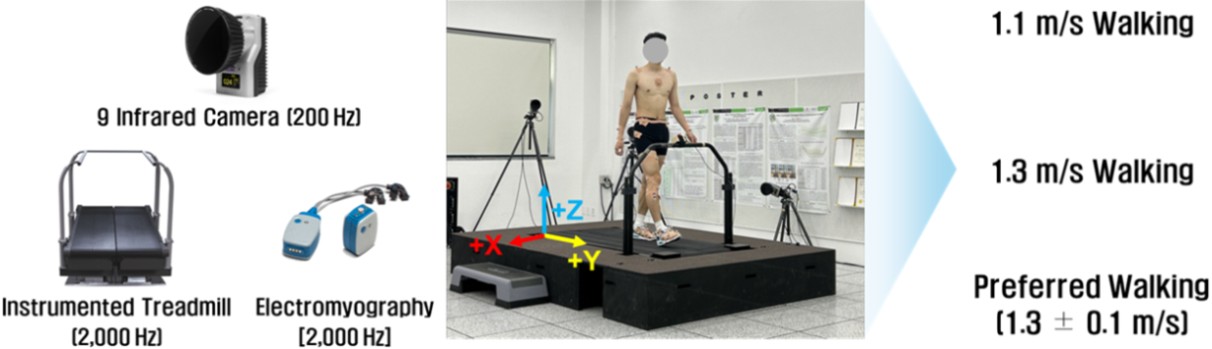
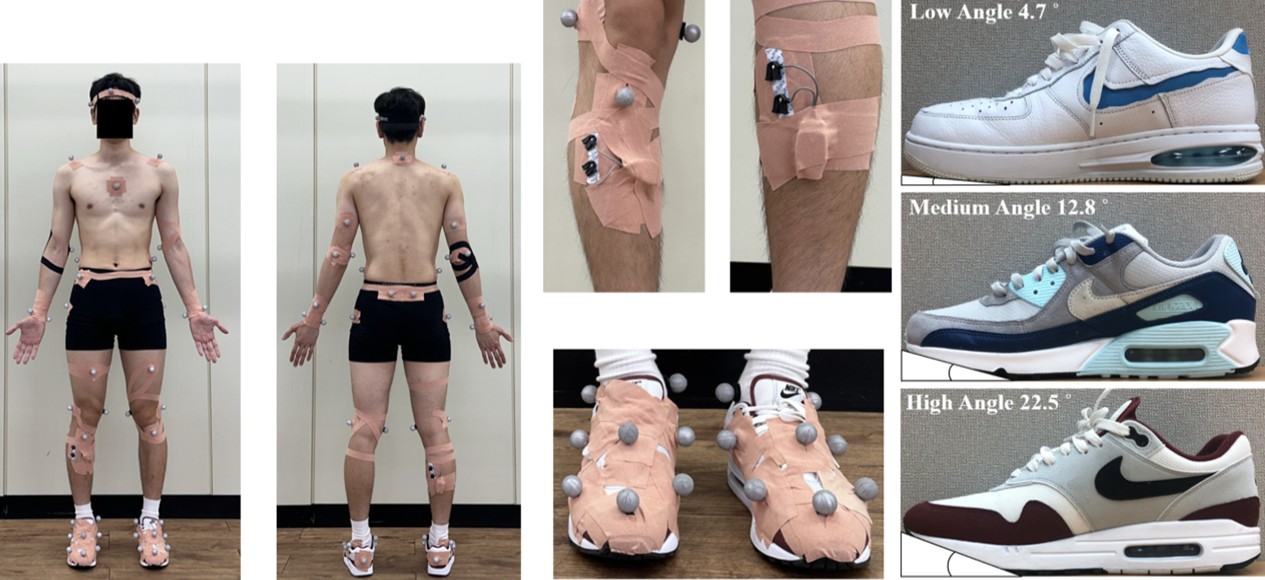
전족 부위의 구조가 보행 시 추진 구간에서의 영향을 규명하기 위해 보행에 적합한 신발로 토 스프링의 각도의 차이를 고려하여 동일한 브랜드(Nike Inc. Korea)의 유사한 형태의 3가지 종류의 신발을 선정하였다. 또한, 세부적인 물성을 포함한 정보는 Runrepeat 사이트의 리뷰를 통해 확인 가능하다. 해당 사이트에서 연구에서 사용한 3가지 신발(nike-air-force-1-07, nike-air-max-90, & nike-air-max-1)을 추가하면 물성 등의 자료가 제공된다(Judith, 2025; McLoughlin, 2025; Turner, 2025). 토 스프링 각도는 선행연구에서 산출한 방법(Sichting et al., 2020)을 토대로 산출하였으며, 낮은 각도(Low Angle (LA): 4.7°), 중간 각도(Medium Angle (MA): 12.8°), 높은 각도(High Angle (HA): 22.5°) 3가지로 구분하였다(Figure 2). 자료 수집을 위한 보행 속도는 선호 속도(PW: Preferred Walking), 지정 속도(LGW: Level Ground Walking: 1.1 m/s, 1.3 m/s)의 3가지 조건이 선택되었다. 선호 속도는 속도 조절이 가능한 트레드밀을 이용하여 3가지 신발을 신고 선호하는 걸음걸이 속도를 측정하였다. 이때 3가지 신발 모두 1.3±0.1 m/s의 속도가 나타났으며, 각 신발 당 선호 속도의 범위는 LA: 1.15-1.55 m/s, MA: 1.15-1.55 m/s, HA: 1.05-1.55 m/s였다. 지정 속도는 Kim (2012)의 연구를 근거로 보통 속도를 1.3 m/s로 설정하였으며, 이를 기준으로 느린 보행 속도인 1.1 m/s를 설정하였다. 또한, 신발과 속도는 대상자마다 무작위(randomized order)로 지정하여 실험을 진행하였으며, 각 신발과 속도 별로 5분씩 보행 후 마지막 1분만의 데이터를 취득하여 취득된 데이터 중 일관된 10 stride를 분석하였다.
3. 자료 처리 및 분석
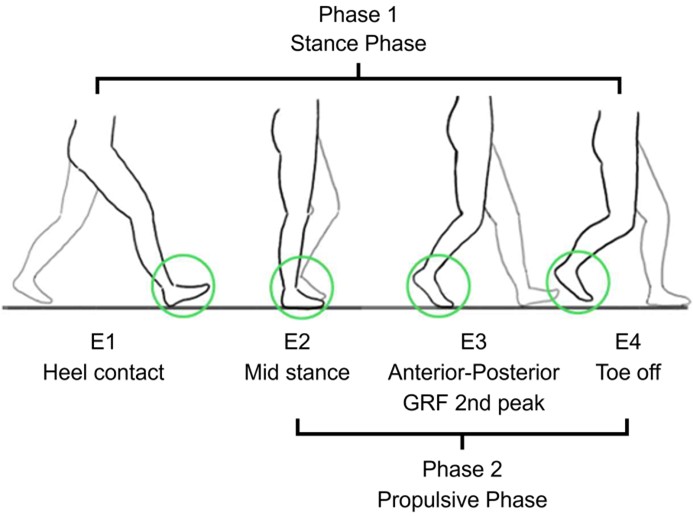
본 연구의 실험 절차에 따라 수집된 운동역학 데이터는 자료취득과정에서 발생하는 오차(random error)를 최소화하기 위해 버터워스 2차 저역 통과 필터(butterworth 2nd order low-pass filter)를 사용하였으며 3차원 위치 데이터의 차단 주파수(cut-off frequency)는 10 Hz (Sichting et al., 2020), 지면반력 데이터는 50 Hz로 설정하였다(Bruening & Takahashi, 2018). 근활성도 데이터는 구간통과필터(band-pass filter)를 사용하였으며, 이때 차단 주파수는 20-450 Hz로 설정하였으며(Moreira, Figueiredo, Fonseca, Vilas-Boas & Santos, 2021), RMS (root mean square)을 통하여 변환된 값을 사용하였다. 본 연구는 운동화 토 스프링 각도에 따른 운동역학적 특성을 분석하기 위해 4개의 Event와 2개의 Phase로 설정하였다. 먼저, 오른발 발꿈치 닿기(Heel contact)를 Event 1, 중간디딤기(Mid stance)를 Event 2, 전후 지면반력 두 번째 최대값(Anterior-Posterior GRF 2nd peak)이 나오는 시점을 Event 3, 발가락 떼기(Toe off)를 Event 4로 설정하였으며, E1과 E2 사이의 구간을 디딤기 구간인 Phase 1, E2-E4까지의 구간을 추 진 구간인 Phase 2로 설정하였다(Figure 3). 취득한 데이터는 Visual 3D (Has-motion, CAN)를 사용하여 운동역학적 변인을 산출하였다. 이때 발목 및 MTP 관절의 각도와 모멘트의 방향 정의는 배측굴곡(Dorsiflexion)을 양(+)의 값, 저측굴곡을 음(-)의 값으로 정의하였다.
4. 통계처리
본 연구의 통계처리는 보행 시 토 스프링 각도에 따른 운동역학적 변인들의 차이를 검증하기 위해 일원 배치 반복 측정 분산분석(one-way repeated measures ANOVA)을 실시하였으며, 유의한 차이가 나타난 경우에는 Bonferroni 검증을 통해 사후 검정(post-hoc test)을 실시하였다. 이때 통계적 유의수준은 α = .05로 설정하였다.
본 연구는 보행 시 운동화의 토 스프링 각도에 따른 운동역학적 차이를 알아보기 위해 3차원 동작분석을 수행하였으며, 연구 결과는 다음과 같다.
1. 토 스프링 각도에 따른 보행 지수의 차이
토 스프링 각도에 따른 보행 지수 중 접촉시간과 보빈도는 지정 속도에서 유의한 차이를 나타내었고, 한걸음 길이는 선호 속도에서 유의한 차이를 나타났다(Table 1). 운동화의 토 스프링 각도가 증가함에 따라 각각의 지정 속도(1.1 m/s, 1.3 m/s)에서 접촉시간이 감소하고 이에 따라 보폭빈도가 증가(1.3 m/s)하는 경향을 나타내었다. 한편 선호 속도(PW)의 보행에서 토 스프링의 증가에 따라 보폭이 증가하는 결과를 나타내었다.
|
Velocity |
Low angleL |
Medium angleM |
High angleH |
F (p) |
post-hoc |
|
|
Contact |
PW |
0.71±0.03 |
0.69±0.04 |
0.69±0.03 |
2.48 (.10) |
- |
|
LGW (1.1
m/s) |
0.78±0.04 |
0.77±0.04 |
0.76±0.04 |
6.36 (.01)* |
H < L |
|
|
LGW (1.3
m/s) |
0.72±0.04 |
0.70±0.04 |
0.70±0.04 |
4.91 (.01)* |
M < L |
|
|
Stride |
PW |
1.43±0.13 |
1.52±0.16 |
1.52±0.13 |
5.05 (.01)* |
L < H |
|
LGW (1.1
m/s) |
1.33±0.06 |
1.32±0.07 |
1.31±0.06 |
1.01 (.38) |
- |
|
|
LGW (1.3
m/s) |
1.47±0.06 |
1.45±0.06 |
1.45±0.06 |
2.96 (.07) |
- |
|
|
Cadence |
PW |
113.43±4.57 |
116.33±6.28 |
115.67±4.58 |
2.57 (.09) |
- |
|
LGW (1.1
m/s) |
106.41±6.05 |
106.81±6.71 |
107.79±6.15 |
2.05 (.15) |
- |
|
|
LGW (1.3
m/s) |
112.54±5.69 |
114.94±5.69 |
114.93±6.24 |
5.07 (.01)* |
L < M, H |
|
|
Indicates
significant difference (p<.05) |
||||||
2. 토 스프링 각도에 따른 발목관절과 MTP 관절 최대 각도의 차이
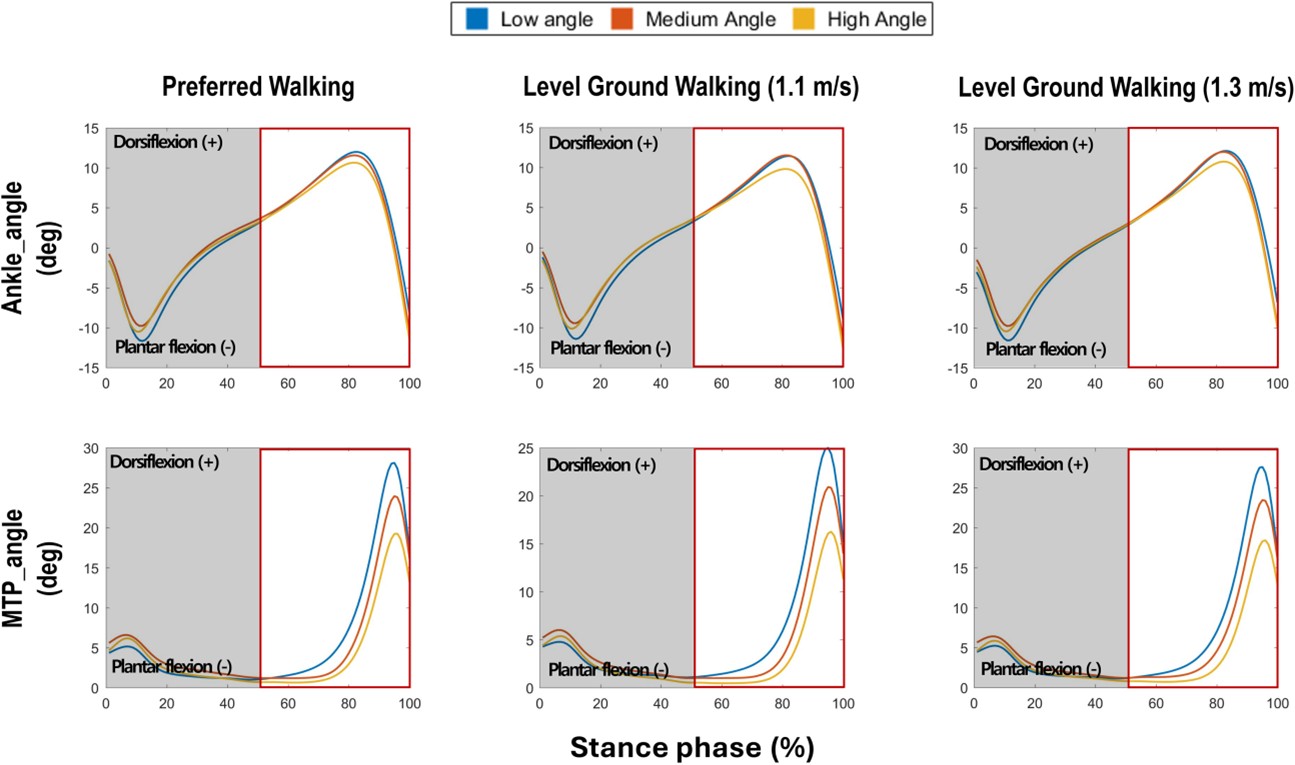
시상면에서 산출된 토 스프링 각도에 따른 발목관절의 최대 저측굴곡 각도와 MTP 관절의 최대 배측굴곡 각도는 모든 속도에서 유의한 차이가 나타났다(Table 2, Figure 4). 토 스프링 각도의 증가에 따라 추진기 발목 관절의 최대 저축 굴곡 각도는 증가하고 최대 MTP 관절의 배측굴곡 각도는 감소하였다.
|
Velocity |
Low angleL |
Medium angleM |
High angleH |
F (p) |
post-hoc |
|
|
Ankle |
PW |
-11.27±4.48 |
-13.78±3.75 |
-14.84±2.85 |
11.85 (.01)* |
L < M, H |
|
LGW (1.1 m/s) |
-9.09±4.12 |
-11.95±3.44 |
-12.13±3.43 |
9.40 (.01)* |
L < M, H |
|
|
LGW (1.3 m/s) |
-10.64±4.24 |
-12.86±3.19 |
-13.93±2.99 |
10.75 (.01)* |
L < M, H |
|
|
MTP |
PW |
28.28±3.72 |
24.22±4.14 |
19.34±3.64 |
86.37 (.01)* |
H < M < L |
|
LGW (1.1 m/s) |
25.31±3.51 |
21.22±3.76 |
16.47±3.36 |
145.92 (.01)* |
H < M < L |
|
|
LGW (1.3 m/s) |
27.88±3.69 |
23.68±4.03 |
18.58±3.50 |
160.40 (.01)* |
H < M < L |
|
|
Indicates
significant difference (p<.05) PW:
Preferred Walking (1.3±0.1 m/s), LGW: Level Ground Walking Ankle/MTP:
Dorsiflexion (+)/Plantar flexion (-) |
||||||
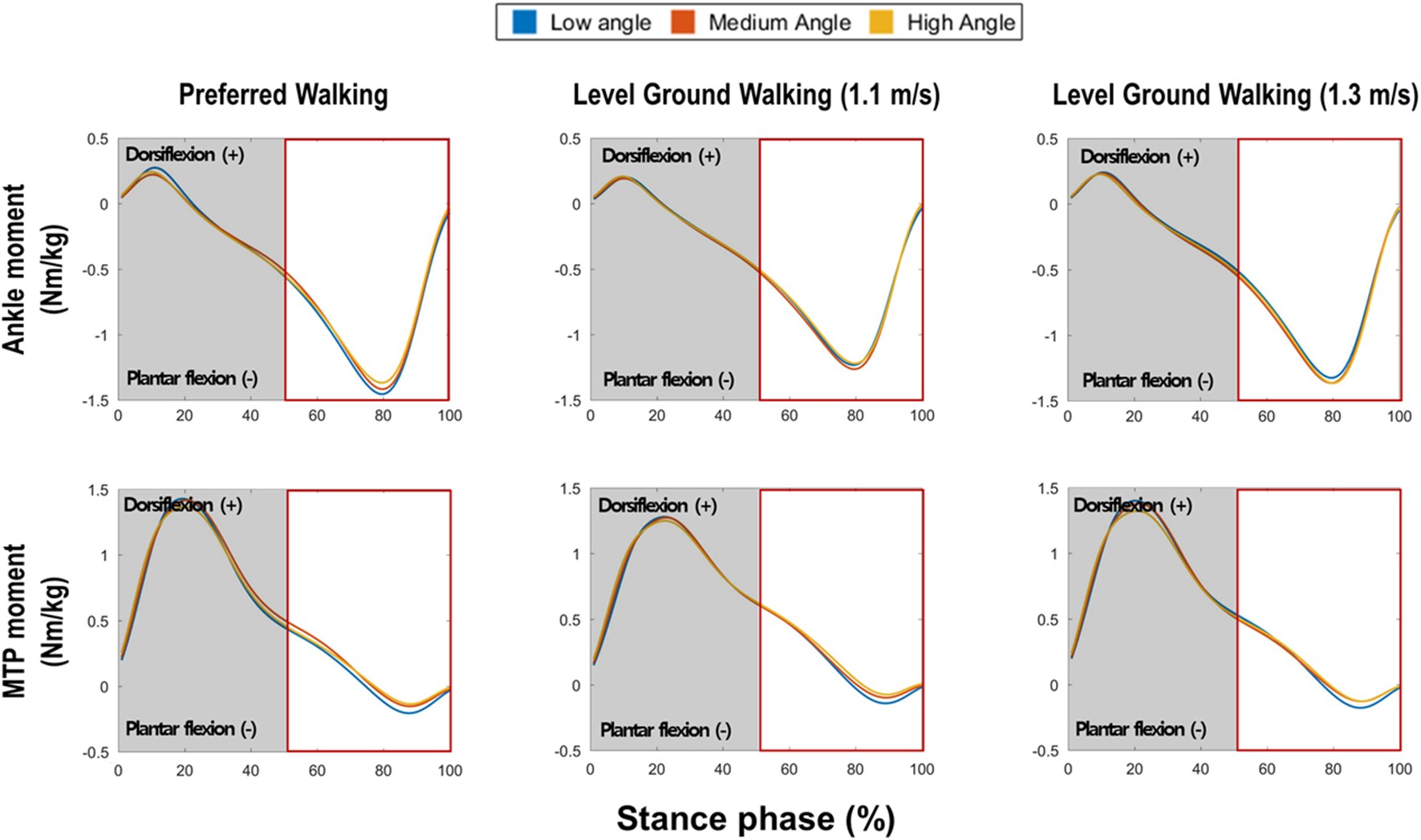
3. 토 스프링 각도에 따른 발목관절과 MTP 관절 최대 모멘트의 차이
시상면에서 산출된 토 스프링 각도에 따른 발목관절의 최대 저측굴곡 모멘트는 선호 속도에서 통계적으로 유의한 차이를 나타냈으며, MTP 관절의 최대 배측굴곡 모멘트는 모든 속도에서 유의한 차이가 나타났다(Table 3, Figure 5). 토 스프링 각도가 증가함에 따라 추진 시 최대 발목관절의 저측굴곡 모멘트가 감소하는 경향을 나타내었다. 또한, 토 스프링 각도의 증가에 따라 MTP 관절의 저측굴곡 모멘트도 감소하는 경향을 나타내었다.
|
Velocity |
Low angleL |
Medium angleM |
High angleH |
F (p) |
post-hoc |
|
|
Ankle |
PW |
-1.49±0.17 |
-1.45±0.18 |
-1.40±0.17 |
4.57 (.02)* |
H < L |
|
LGW (1.1 m/s) |
-1.28±0.22 |
-1.31±0.18 |
-1.26±0.17 |
0.59 (.56) |
- |
|
|
LGW (1.3 m/s) |
-1.36±0.21 |
-1.38±0.17 |
-1.39±0.13 |
0.32 (.73) |
- |
|
|
MTP |
PW |
-0.25±0.08 |
-0.21±0.06 |
-0.18±0.07 |
15.47 (.01)* |
H < M < L |
|
LGW (1.1 m/s) |
-0.19±0.07 |
-0.15±0.05 |
-0.13±0.06 |
15.45 (.01)* |
M, H < L |
|
|
LGW (1.3 m/s) |
-0.21±0.07 |
-0.17±0.07 |
-0.16±0.05 |
7.18 (.01)* |
M, H < L |
|
|
Indicates significant difference (p<.05) PW: Preferred Walking (1.3±0.1 m/s), LGW: Level Ground Walking Ankle/MTP: Dorsiflexion (+)/Plantar flexion (-) |
||||||
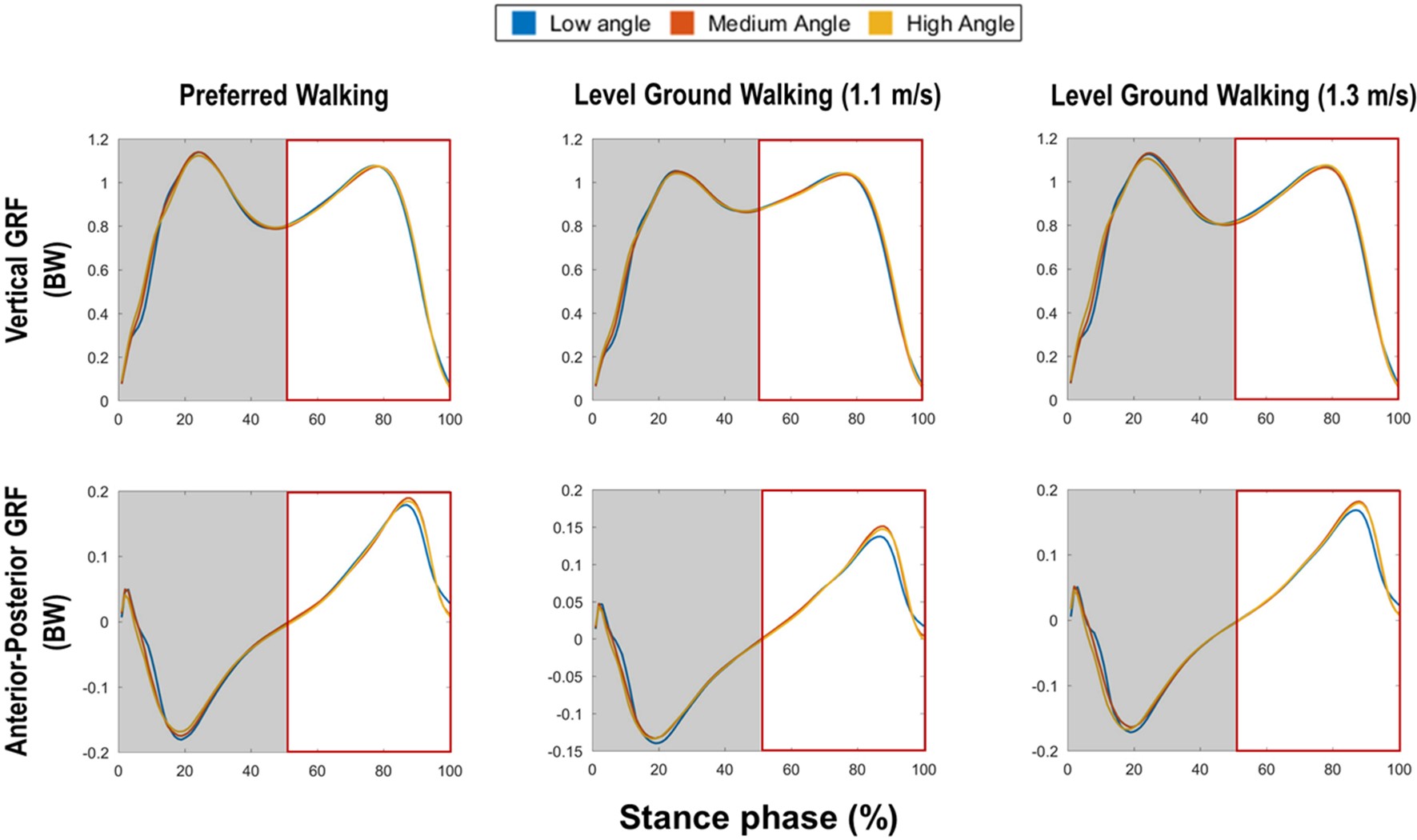
4. 토 스프링 각도에 따른 전후 지면반력 두 번째 최댓값의 차이
토 스프링 각도에 따른 수직 지면반력 두 번째 최댓값 결과는 선호 속도와 1.1 m/s 지정 속도에서 유의한 차이가 나타났으며, 전후 지면반력 두 번째 최댓값 결과는 지정 속도에서 모두 유의한 차이가 나타났다(Table 4, Figure 6). 이때 토 스프링 각도가 증가함에 따라 추진 구간에서의 최대 수직 지면반력의 크기는 감소하였으며, 최대 전후 지면반력의 크기는 증가하였다.
|
Velocity |
Low angleL |
Medium angleM |
High angleH |
F (p) |
post-hoc |
|
|
Vertical |
PW |
0.89±0.07 |
0.85±0.12 |
0.83±0.11 |
7.34 (.01)* |
H < L |
|
LGW (1.1 m/s) |
0.80±0.06 |
0.78±0.07 |
0.76±0.07 |
3.71 (.04)* |
H < L |
|
|
LGW (1.3 m/s) |
0.85±0.07 |
0.83±0.06 |
0.84±0.07 |
1.68 (.20) |
- |
|
|
Anterior |
PW |
0.18±0.03 |
0.19±0.04 |
0.18±0.04 |
0.58 (.57) |
- |
|
LGW (1.1 m/s) |
0.14±0.02 |
0.15±0.02 |
0.15±0.02 |
14.47 (.01)* |
L < M, H |
|
|
LGW (1.3 m/s) |
0.17±0.02 |
0.18±0.02 |
0.18±0.02 |
17.00 (.01)* |
L < M, H |
|
|
Indicates significant difference (p<.05) PW: Preferred Walking (1.3±0.1 m/s), LGW: Level Ground Walking |
||||||
5. 토 스프링 각도에 따른 추진 구간 근활성도의 차이
토 스프링 각도에 따른 추진 구간에서 앞정강근과 안쪽 장딴지근의 근활성도 결과, 앞정강근의 선호 속도에서 유의한 차이가 나타났다(Table 5). 이때 토 스프링 각도가 증가함에 따라서 앞정강근의 근활성도가 상대적으로 감소하는 경향을 나타내었다.
|
Velocity |
Low angleL |
Midium angleM |
High angleH |
F (p) |
post-hoc |
|
|
Medial gastrocnemius |
PW |
14.65±8.23 |
13.55±8.27 |
15.23±7.93 |
0.84
(.44) |
- |
|
LGW (1.1 m/s) |
14.85±8.06 |
14.60±8.66 |
14.97±9.37 |
0.04
(.96) |
- |
|
|
LGW (1.3 m/s) |
13.64±8.19 |
13.65±6.56 |
12.95±7.93 |
0.27
(.77) |
- |
|
|
Tibialis anterior |
PW |
5.46±2.03 |
6.05±2.43 |
4.48±1.75 |
4.95 (.01)* |
H < M |
|
LGW (1.1 m/s) |
4.54±1.67 |
4.69±1.60 |
3.79±1.13 |
3.04
(.06) |
- |
|
|
LGW (1.3 m/s) |
5.40±1.57 |
5.38±2.30 |
4.76±1.64 |
0.82
(.45) |
- |
|
|
Indicates significant difference (p<.05) |
||||||
본 연구는 운동화의 전족 부위에 토 스프링의 운동역학적 영향을 규명하기 위해서 속도에 따른 보행을 분석하였다. 이때 토 스프링 각도에 따른 보행 지수, 지지기 구간의 추진 시 관절의 움직임(시상면의 발목 및 MTP 관절 각도)과 운동역학적 특성을 나타내는 변인(관절 모멘트, 전후 지면반력, 근활성도)을 산출하였다. 연구 결과 보행 시 토 스프링 각도가 증가할수록 보폭이 감소했다. 또한, 토 스프링이 증가할수록 보행 추진기에서 MTP 관절의 움직임의 감소에 직접적 영향을 나타내었다. 이에 보행의 운동학적 요인에 변화로는 발목관절 모멘트와 앞정강근의 활성도의 감소시키는 효과를 나타내었다.
1. 보행 지수에 미치는 영향
먼저, 토 스프링의 증가에 따라 선호 속도의 보행에서 보폭이 증가하는 현상을 나타내었다. 한편, 지정된 속도에서는 각각 지지시간의 감소와 보빈도의 증가가 관찰되었다. 다만, 토 스프링 구조로 인해 보행 지수 중 보폭과 보행 속도에 영향은 통제되지 않은 선호 속도와 통제된 지정 속도에서의 영향이 상이할 수 있다고 판단된다. 선행연구에서는 보폭의 감소와 보빈도의 증가는 보행의 효율성 측면에서 긍정적이라고 하였다(Cavanagh & Kram, 1989; Kim et al., 2019). 또한 보행 시 보폭의 감소는 수직 충격을 감소시키고 하지관절에 부하를 감소시켜 안정적인 움직임을 유도하는 요인으로 보고하였다(Crowell, Milner, Hamill & Davis, 2010). 따라서 속도가 통제되지 않은 보행 상황에서 운동화의 토 스프링의 효과는 보폭과 보행 속도의 증가가 예상되는 반면 고정된 속도의 보행에서의 보행 지수 중 보폭의 감소와 보빈도의 증가를 나타나는 영향을 확인할 수 있었다. 이에 대한 보행의 효율성과 관절 부하의 크기를 통한 해석은 상이할 수 있을 것으로 판단된다.
2. 운동학적 요인에 미치는 영향
보행 시 토 스프링 각도가 증가할수록 모든 속도에서 MTP 관절의 최대 배측굴곡 각도는 감소하였다. 이는 선행연구에서 신발의 밑창굴곡 형태가 유선형을 나타내면 하지관절 최대 각도를 감소시킨다는 연구의 결과와 일치한다(Choi, Kang, Mun, Bang & Tak, 2009). 토 스프링의 형태는 신발의 토 캡이 지면으로부터 배측굴곡 되어있는 유선형의 신발의 형태로 이러한 밑창의 형태가 MTP 관절의 굴곡 각도를 감소시켰다고 판단된다(Sichting et al., 2020). 반면, 토 스프링의 각도가 증가할수록 MTP 관절의 최대 굴곡은 감소하였지만, 추진 구간 중 이지의 시점(take off)에서 발목관절의 최대 저측굴곡 각도는 증가했다. 이는 선행연구의 락커 형태의 신발에서와 같이 둥근 형태의 바닥이나 높은 토 스프링 각도가 보행의 지지 구간에서 롤링(rolling)의 움직임을 보다 원활하게 한다는 관점에서 이해될 수 있다(Adamczyk, Collins & Kuo, 2006; Honert, Bastas & Zelik, 2018; Schaf & Cavanagh, 1990). Czerniecki (1988)은 디딤기 말기에서 앞으로 이동하기 위한 추진력을 생성하기 위해 발목의 저측굴곡이 일어나며, 이때 두 발로 지면을 밀어내며 무게중심의 이동을 줄여 에너지 효율성에 기여한다고 보고하였다. 이는 본 연구 결과, 디딤기 말기인 이지 시점(take off)에서 발목의 최대 저측굴곡 값이 상승한 것과 같은 결과를 나타냈으며, 이러한 움직임은 원활한 이동을 위한 것이라고 판단된다.
3. 운동역학적 및 근활성도에 미치는 영향
중간디딤기 이후 추진 구간에서 발목관절의 저측굴곡 모멘트가 최대로 발생한다(Winter, 1984). 이러한 저측굴곡 모멘트는 추진을 위한 회전력으로 발목의 저측굴곡 움직임의 속도를 통해 양의 파워와 일을 발생하게 된다. 다만, 관절 모멘트의 크기는 관절의 부하 및 피로 뿐만 아니라 상해와도 밀접한 관련이 있다고 보고되어진다(Andriacchi, 2013). 선행연구에서 신발의 아웃솔의 형태를 달리한 굴곡형 신발에 비해 평평한 신발의 형태에서 최대 저측굴곡 모멘트가 크다고 보고되었다(Byun, 2010). 본 연구도 낮은 토 스프링 각도의 신발에서 발목관절의 저측굴곡 모멘트가 크게 나타나는 반면 신발의 토 스프링 각도의 변경을 통해 발의 락커 기능을 보완하면 관절 모멘트가 감소하는 효과를 나타내었다. 이는 신발의 토 스프링 구조가 체력 수준이나 대상자에 따라 장시간 보행을 진행할 때 반복적으로 발생하는 발목관절의 스트레스를 완화하여 하지관절의 피로나 발목 부상의 예방에 긍정적 도움을 줄 것으로 예상되어진다(Mayich et al., 2014).
한편 본 연구에서는 토 스프링 구조가 발의 락커 기능을 보조하여 발목과 MTP 관절 모멘트 값을 전체적으로 감소시켰다. 이는 Sichting 등 (2020)의 연구에서 토 스프링 각도의 증가로 MTP 관절의 부적 파워가 감소하는 경향과도 유사한 결과를 나타내었다. 관절 파워의 감소는 토 스프링에 의한 MTP 관절의 가동범위의 감소나 지면반력으로부터 MTP 관절까지의 모멘트 암의 길이의 감소와 연관이 있을 것이다. 이는 선행연구에서도 일정한 토 스프링 각도와 종방향 굽힘강성의 변화로 MTP 관절이 배측굴곡된 상태에서 지면과 발목관절 사이의 모멘트 암의 길이가 달라진다고 하였다(Ortega, Healey, Swinnen & Hoogkamer, 2021). 하지만 발의 MTP 관절이 배측굴곡 시 발의 윈드라스(windlass) 구조의 특성에 의해 발 바닥의 종적 아치의 높이와 경도(stiffness, tension)를 증가시킬 수도 있다고 보고하였다(Hicks, 1954). 따라서 신발의 토 스프링의 각도를 통해서 보행의 효율성과 피로 및 부상의 관점에서 발목과 MTP 관절의 움직임과 발생하는 부하의 형태와 시점 등을 고려하여 신발의 여러 요인들을 복합적으로 고려할 필요가 있다고 판단된다.
토 스프링 각도가 증가할수록 수직 지면반력의 두 번째 최대값은 감소하였으며, 전후 지면반력의 두 번째 최대값은 증가하는 결과를 나타내었다. 이는 토 스프링 각도가 증가할수록 전후 지면반력의 두 번째 최대값이 증가한 Hemmati와 Karimi (2022)의 연구와 동일한 결과를 나타내었다. 관절 모멘트는 지면반력과 모멘트 암의 곱(혹은 거리벡터와 힘벡터의 외적)으로 표현되며, 굴곡-신전 모멘트는 수직 및 전후와의 지면반력과 모멘트 암에 영향을 받는다(Winter, 2009). 그러나, Nigro와 Arch (2022)는 추진 구간의 전체 지면반력 중 전후 지면반력의 기여도는 수직 지면반력에 비해 합 모멘트 크기에 기여도가 낮다고 보고하며, 본 연구에서도 토 스프링 각도가 증가할수록 전후 지면반력은 0.01 BW 정도 증가하였지만, 수직 지면반력은 0.04-0.06 BW 정도 감소하는 결과를 나타내었다. 이처럼 증가한 수평 지면반력 크기 대비 상대적으로 크게 감소한 수직 지면반력의 크기로 인해 발목 및 MTP 관절 모멘트가 감소했을 가능성이 높다.
보행은 상하지를 대칭적으로 회전시키고 발의 지면에 지지와 이지를 반복하며 보행이 이루어진다(Perry, 2012). 이때 하지의 보행에 필요한 주동근과 보조근은 주기적으로 시점과 활성 수준을 달리하며 이루어진다. 특히, 발로 지면을 밀어내는 구간에서는 발목과 종아리 근육의 저측굴곡근을 주로 활성화하여 보행하게 된다(Kwon, Yoon, Lee & Shin, 2021). 본 연구에서는 토 스프링 각도가 증가할수록 보행 시 앞정강근의 활성도가 감소하는 경향을 나타냈는데 추진 시의 주동근으로써의 역할보다는 양발 지지기에서의 좌우 전환 시 일부 감소의 경향을 나타냄을 관찰하였다. 다만, 본 연구에서는 추진 시 주동근인 안쪽 장딴지근에서의 변화가 나타나지 않은 점과 제한된 근육의 수로 인해 향후 추가적인 분석이 요구되어진다.
본 연구의 목적은 신발의 토 스프링 각도가 보행 시 추진기에서 나타나는 운동역학적 특성을 분석하고, 신발의 토 스프링 구조의 운동역학적 기능을 이해하는데 있었다. 이를 위해 본 연구에서는 토 스프링 각도가 다른 3가지 신발을 사용하였지만, 토 스프링 각도를 제외한 다른 신발의 구조에 대한 통제는 이루어지지 않았다. 또한, 본 연구에서는 2가지 지정 속도(1.1 m/s, 1.3 m/s)와 선호 속도(1.3±0.1 m/s) 총 3가지의 속도에서 보행을 실시하였지만, 향후의 연구에서는 보다 빠른 속도(1.3 m/s 이상)에서의 분석을 통해 다양한 속도에서의 보행에 미치는 효과와 달리기 등에서의 토 스프링의 효과까지 연구가 가능할 것이다.
본 연구의 목적은 운동화의 토 스프링 각도가 운동역학적 요소에 어떤 영향을 미치는지 분석하고, 토 스프링 각도에 따라 변화하는 보행의 자연스러운 움직임을 파악하는 것이었다. 연구 결과, 신발의 토 스프링 각도가 증가하면, MTP 관절의 배측굴곡 각도는 감소하고 이지 시 발목의 저측굴곡 각도는 증가하였다. 한편 발목과 MTP 관절의 모멘트가 감소하여 토 스프링 구조가 발의 락커 기능을 보조하여 장시간 보행 시 반복적으로 가해지는 스트레스를 줄이는 데 효과가 있을 것으로 예상된다. 다만, 어느 정도의 신발의 토 스프링 각도가 보다 빠른 보행이나 달리기 등과 같은 보다 동적인 상황에서 어떻게 MTP 관절의 움직임을 유도하고 움직임의 효율성을 향상시키는 후속 연구가 요구되어진다. 또한 본 연구에서는 신발의 토 스프링 각도를 제외한 다른 신발의 디자인과 물성(소재, 무게, 경도 등)에 대한 통제는 이루어지지 못하였으며, 이를 반영하여 향후의 연구에서는 신발 형태에 대한 통제를 통해 토 스프링의 각도의 효과를 면밀이 분석할 필요성이 있다고 판단되어진다.
References
1. Adamczyk, P. G., Collins, S. H. & Kuo, A. D. (2006). The advan- tages of a rolling foot in human walking. Journal of Experimental Biology, 209(20), 3953-3963.
Google Scholar
2. Andriacchi, T. P. (2013). Valgus alignment and lateral compart- ment knee OA: A biomechanical paradox or new insight into knee OA?. Arthritis and Rheumatism, 65(2), 310.
Google Scholar
3. Bruening, D. A. & Takahashi, K. Z. (2018). Partitioning ground reaction forces for multi-segment foot joint kinetics. Gait & Posture, 62, 111-116.
Google Scholar
4. Byun, K. S. (2010). Biomechanical analysis of different outsole types of functional walking shoes. Un-published Master's Dissertion. Graduate School of Sungkyunkwan University.
5. Cavanagh, P. R. & Kram, R. (1989). Stride length in distance running: Velocity, body dimensions, and added mass effects. Medicine and Science in Sports and Exercise, 21(4), 467-479.
Google Scholar
6. Cho, K. K. & Kim, Y. S. (2002). Analysis of kinematics in gait motions on different grades and speeds of treadmill gait. Korean Journal of Sport Biomechanics, 12(1), 175-191.
7. Choi, J. S., Kang, D. W., Mun, K., Bang, Y. H. & Tack, G. R. (2009). Effects of outsole shape modification on lower limb mechanics during gait. Journal of the Ergonomics Society of Korea, 2009(5), 377-380.
8. Crowell, H. P., Milner, C. E., Hamill, J. & Davis, I. S. (2010). Reducing impact loading during running with the use of real-time visual feedback. Journal of Orthopaedic & Sports Physical Therapy, 40(4), 206-213.
Google Scholar
9. Czerniecki, J. M. (1988). Foot and ankle biomechanics in walk- ing and running: a review. American Journal of Physical Medicine & Rehabilitation, 67(6), 246-252.
Google Scholar
10. Hemmati, F. & Karimi, M. T. (2022). The effect of rocker sole shoes on ground reaction force in the elderly. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 236(7), 988-993.
Google Scholar
11. Hicks, J. H. (1954). The mechanics of the foot: II. The plantar aponeurosis and the arch. Journal of Anatomy, 88(Pt 1), 25.
Google Scholar
12. Honert, E. C., Bastas, G. & Zelik, K. E. (2018). Effect of toe joint stiffness and toe shape on walking biomechanics. Bioinspiration & Biomimetics, 13(6), 066007.
Google Scholar
13. Jang, Y. M., Lee, J. S., Yang, J. O. & Lee, B. J. (2016). Biomech- anical analysis of muscle fatigue and ground reaction force for the development of outdoor walking shoes. Korean Journal of Sport Biomechanics, 26(4), 413-420.
Google Scholar
14. Jeong, C. G. (2011). Plantar foot pressure analysis according to outsole types of special shoes for walking. Un-published Master's Dissertion. Graduate school of Education Silla University.
15. Judith. (2025, February 20). Nike Air Max 1 review. RunRepeat. https://runrepeat.com/nike-air-max-1
16. Jung, J. Y., Park, I. S., Won, Y. G., Kwon, D. K. & Kim J. J. (2012). Effects of forefoot rocker bottom shoes with metatarsal bar on gait during the stance phase of human walking. Journal of the Ergonomics Society of Korea, 2012(5), 86-92.
Google Scholar
17. Kim, J. B., Ha, S., Park, S., Yoon, S., Ryu, J. S. & Park, S. K. (2019). Comparison of physical characteristics and lower extremity biomechanics of elderly and young adult runners. Korean Journal of Sport Biomechanics, 29(3), 145-155.
18. Kim, M. K. (2012). A bomechanical analysis of lower extremity on the flatfoot with slopes and velocity change on tread- mill, Un-published Doctor's Dissertion. Graduate School of Daegu University.
19. Kim, S. J. & Kim, D. G. (2000). Planned paper: Footwear mater- ials – overview of footwear component manufacturing and substances. Rubber Technology, 1(2), 149-162.
20. Kwon, Y., Yoon, W., Lee, J. & Shin, G. (2021). Gender differences in push-off strategy among young adults during over- ground walking. Journal of the Ergonomics Society of Korea, 302-302.
21. Long, J. T., Klein, J. P., Sirota, N. M., Wertsch, J. J., Janisse, D. & Harris, G. F. (2007). Biomechanics of the double rocker sole shoe: gait kinematics and kinetics. Journal of Bio- mechanics, 40(13), 2882-2890.
Google Scholar
22. Mayich, D. J., Novak, A., Vena, D., Daniels, T. R. & Brodsky, J. W. (2014). Gait analysis in orthopedic foot and ankle surgery-topical review, part 1: principles and uses of gait analysis. Foot & Ankle International, 35(1), 80-90.
Google Scholar
23. McLoughlin, D. (2025, February 20). Nike Air Force 1 07 review. RunRepeat. https://runrepeat.com/nike-air-force-1-07
24. Moreira, L., Figueiredo, J., Fonseca, P., Vilas-Boas, J. P. & Santos, C. P. (2021). Lower limb kinematic, kinetic, and EMG data from young healthy humans during walking at controlled speeds. Scientific Data, 8(1), 103.
Google Scholar
25. Nawoczenski, D. A., Baumhauer, J. F. & Umberger, B. R. (1999). Relationship between clinical measurements and motion of the first metatarsophalangeal joint during gait. The Journal of Bone and Joint Surgery. American Volume, 81(3), 370-376.
Google Scholar
26. Neumann, D. A. (2018). Kinesiology of the musculoskeletal system: foundations for rehabilitation. Seoul: PANMUN- EDUCATION.
27. Nigro, L. & Arch, E. S. (2022). Metatarsophalangeal joint dynamic stiffness during toe rocker changes with walking speed. Journal of Applied Biomechanics, 38(5), 320-327.
Google Scholar
28. Ortega, J. A., Healey, L. A., Swinnen, W. & Hoogkamer, W. (2021). Energetics and biomechanics of running footwear with increased longitudinal bending stiffness: a narrative review. Sports Medicine, 51(5), 873-894.
Google Scholar
29. Perry, J. (2012). Gait analysis: [normal and pathological func- tion]. Seoul: YMSBOOK.
Google Scholar
30. Ruggiero, L., Carpi, M. & Minetti, A. E. (2022). Rocker-profile design shoes improve pendular energy recovery in walk- ing with no effects on total mechanical work. Journal of Biomechanics, 144, 111345.
Google Scholar
31. Schaff, P. S. & Cavanagh, P. R. (1990). Shoes for the insensitive foot: the effect of a "rocker bottom" shoe modification on plantar pressure distribution. Foot & Ankle, 11(3), 129-140.
Google Scholar
32. Shim, J. Y. & Woo, B. H. (2018). Effects of shoe types and weighted backpack on gait pattern. The Korea Journal of Sport, 16(3), 493-502.
33. Sichting, F., Holowka, N. B., Hansen, O. B. & Lieberman, D. E. (2020). Effect of the upward curvature of toe springs on walking biomechanics in humans. Scientific Reports, 10(1), 14643.
Google Scholar
34. Turner, D. (2025, February 13). Nike Air Max 90 review. RunRepeat. https://runrepeat.com/nike-air-max-90
35. Van Bogart, J. J., Long, J. T., Klein, J. P., Wertsch, J. J., Janisse, D. J. & Harris, G. F. (2005). Effects of the toe-only rocker on gait kinematics and kinetics in able-bodied persons. IEEE Trans- actions on Neural Systems and Rehabilitation Engineering, 13(4), 542-550.
Google Scholar
36. van Kouwenhove, L., Verkerke, G. J., Postema, K., Dekker, R. & Hijmans, J. M. (2021). Effect of different forefoot rocker radii on lower-limb joint biomechanics in healthy in- dividuals. Gait & Posture, 86, 150-156.
Google Scholar
37. Winter, D. A. (1984). Kinematic and kinetic patterns in human gait: variability and compensating effects. Human Move- ment Science, 3(1-2), 51-76.
Google Scholar
38. Winter, D. A. (2009). Biomechanics and motor control of human movement. John wiley & sons.
Google Scholar
39. Zhang, J., Si, Y., Zhang, Y. & Liu, Y. (2014). The effects of restricting the flexion-extension motion of the first meta- tarsophalangeal joint on human walking gait. Bio-Medical Materials and Engineering, 24(6), 2577-2584.
Google Scholar
